Текст 3D¶
- объект Teкст 3D; Text3DReactor¶
Производный от: Система координат (TransformNodeReactor)
Текст 3D используется для создания трёхмерного текста в сцене.
Формально Текст (TextReactor) и Teкст 3D (Text3DReactor) не имеют общих классов, хотя и имеют схожий набор параметров.
Свойства текста¶
Вводится в Teкст 3D (Text3DReactor)
Параметр |
Описание |
|---|---|
Значение текста. |
|
Используемый шрифт. |
|
Размер используемого шрифта. |
|
Толщина 3d текста. |
|
Цвет текста. |
|
Расстояние между строками текста. |
|
Выравнивание текста. |
- параметр Текст; text.value¶
Значение текста (например «New text»).
- параметр Шрифт; text.font_id¶
Используемый шрифт (например «OpenSans-Regular.ttf»).
- параметр Размер шрифта; text.font_size¶
Размер используемого шрифта. Используются те же единицы измерения, что и у Прямоугольник (RectReactor).
- параметр Толщина шрифта; text.font_depth¶
Толщина 3d текста.
- параметр Цвет текста; text.color¶
Цвет текста.
- параметр Интерлиньяж; text.line_spacing¶
Расстояние между строками текста.
- параметр Выравнивание; text.align¶
Выравнивание текста как по горизонтали, так и по вертикали.
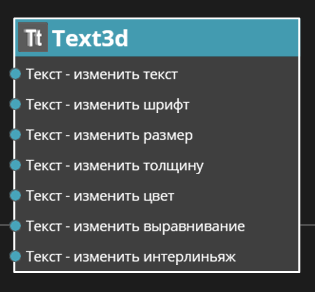
Действия¶
Действие |
Описание |
|---|---|
Установить значение текста. |
|
Установить шрифт для текста. |
|
Установить размер шрифта для текста. |
|
Установить толщину текста. |
|
Установить цвет текста. |
|
Установить выравнивание текста. |
|
Установить расстояние между строками. |
- действие Текст - изменить текст; setText_value(text, concatenate)¶
Установить значение текста. Если задан параметр Конкатенировать с текущим значением, то произойдет конкатенация строк.
- Параметры:
Значение / text – новое значение, которое будет установлено для текста, или конкатенировано с текущим значением.
Конкатенировать с текущим значением / concatenate – Если установлен данный флаг, то произойдет конкатенация(соединение) текущего значения с указанным значением.
- действие Текст - изменить шрифт; setText_font_id(font_id)¶
Установить шрифт для текста.
- Параметры:
Значение / font_id – выбранный шрифт
Примечание
EV Toolbox идет с набором предустановленных шрифтов, которые вы можете выбрать. Также можно добавить свой шрифт во вкладке Ресурсы
- действие Текст - изменить размер; setText_font_size(font_size)¶
Установить размер шрифта для текста.
- Параметры:
Значение / font_size – размер. Используются те же единицы измерения, что и у Прямоугольник (RectReactor).
- действие Текст - изменить толщину; setText_font_depth(depth)¶
Установить толщину 3d текста.
- Параметры:
Значение / depth – толщина.
- действие Текст - изменить цвет; setText_color(color)¶
Установить размер шрифта для текста.
- Параметры:
Значение / color – цвет. Также у цвета можно установить прозрачность.
Примечание
В версии Advanced, если вы захотите установить цвет текста в скриптах, то используйте для задания цвета конструктор
osg.Vec4, который будет содержать RGBA-значения(напримерosg.Vec4(1.0,1.0,1.0,0.5)для белого полупрозрачного цвета).
- действие Текст - изменить выравнивание; setText_align(align)¶
Установить выравнивание текста.
- Параметры:
Значение / align – выравнивание. Указываются как горизонтальное выравнивание, так и вертикальное.
Примечание
В версии Advanced, если вы захотите установить выравнивание текста в скриптах, то используйте строковые значения «left», «center», «right» для горизонтального и «top», «center», «bottom» для вертикального, указанные через дефис. Например, для выравнивания слева по горизонтали и справа по верху укажите «left-top».
- действие Текст - изменить интерлиньяж; setText_line_spacing(line_spacing)¶
Установить расстояние между строками текста(интерлиньяж).
- Параметры:
Значение / line_spacing – расстояние.
Текст3d является производным от Система координат (TransformNodeReactor) и наследует его параметры и действия.
Положение объекта¶
Вводится в Система координат (TransformNodeReactor)
Параметр |
Описание |
|---|---|
Перемещение объекта относительно родительского объекта. |
|
Поворот объекта относительно родительского объекта. |
|
Масштаб объекта относительно родительского объекта. |
Действие |
Описание |
|---|---|
Установить новое перемещение объекта (значение параметра Перемещение (trans)) |
|
Установить новый поворот объекта (значение параметра Вращение (rotate)) |
|
Установить новый масштаб объекта (значение параметра Масштаб (scale)) |
|
Установить новые значения сразу для трех параметров: Перемещение (trans), Вращение (rotate), Масштаб (scale) |
- параметр Перемещение; trans¶
Вводится в Система координат (TransformNodeReactor)
Параметр позволяет задать точный сдвиг объекта по координатам (
x,y,z) относительно родительского объекта.Перемещение задаётся в виде объекта
osg.Vec3. Пример использования:-- Заставим мячик прыгать на месте local ball = ... local velocity = 0 -- Текущая скорость объекта ball.trans = osg.Vec3(0, 0, 0.2) -- Задаём начальное положение - 20 см. local delta_time = 0.01 -- Время между кадрами для обновления -- Функция для обновления function update_velocity_and_position() -- Обновляем положение объекта. -- Для простоты считаем, что скорость за этот период времени не менялась ball.trans = ball.trans + osg.Vec3(0, 0, 1) * velocity * delta_time -- Обновляем скорость: на мячик действует ускорение свободного падения -- 9.8 м/с^2, с предыдущей итерации прошло время delta_time velocity = velocity - 9.8 * delta_time -- Мячик достиг земли - отскок от земли if ball.trans:z() <= 0 then velocity = - velocity end end -- Вызывать функцию обновления позиции каждые delta_time секунд timer:subscribe(update_velocity_and_position, delta_time)
Доступны следующие действия:
 сбросить в нулевое положение
сбросить в нулевое положение поместить на родительский объект(например, метку) автоматически (совместить центр с родительским объектом)
поместить на родительский объект(например, метку) автоматически (совместить центр с родительским объектом)
- параметр Вращение; rotate¶
Вводится в Система координат (TransformNodeReactor)
Параметр позволяет задать точный поворот объекта по осям (
x,y,z) относительно родительского объекта.В данном параметре используются углы Крылова (или углы Эйлера), где порядок поворота осей определяется в порядке:
z,x,y. Все углы задаются в градусах.Параметр имеет тип
osg.Vec3, где каждая компонента вектора соответствует своей оси.Для перевода в градусы и из градусов можно воспользоваться функциями
deg2rad(x)иrad2deg(x). Данные функции могут быть использованы как для чисел, так и для векторовosg.Vec3,osg.Vec2.Для перевода в/из
osg.Quatможно воспользоваться функциямиeuler2quat(ypr)иquat2euler(quat). Важно отметить, что обе функции работают с векторами в радианах. Таким образом, для получения кватерниона из параметра Вращение (rotate), а также наоборот необходимо сделать по два вызова:local model = ... -- Получение кватерниона по параметру rotate local rotation_quat = euler2quat(deg2rad(model.rotate)) -- Присвоение кватерниона параметру rotate model.rotate = rad2deg(quat2euler(rotation_quat))
Пример вращения логотипа:
local logo = ... local function update_logo_rotation() -- Забираем текущий поворот local rot = logo.rotate -- Добавляем небольшое вращение вдоль одной из осей rot:y((rot:y() + 1) % 360) -- Присваиваем новое значение объекту logo.rotate = rot end -- Подписываемся на таймер, чтобы обновление происходило каждые 0.01 секунд timer:subscribe(update_logo_rotation, 0.01)
Пример поворота объекта в сторону метки:
local model = ... local marker = ... -- Функция построения кватерниона для поворота от from к to local function _make_directed_rotation(from, to) -- Вращать будем относительно оси, ортогональной обоим векторам, -- для его получения воспользуемся векторным произведением local axis = osg.Vec3.cross(from, to) -- Для получения угла вращения воспользуемся скалярным произведением: -- v1 * v2 = |v1| |v2| cos(angle(v1, v2)) => angle = acos(v1 * v2 / (|v1| |v2|)) local angle_cos = osg.Vec3.dot(from, to) / (from:length() * to:length()) local angle = math.acos(angle_cos) -- Возвращаем кватернион вращения с найденной осью и углом return osg.Quat(angle, axis) end local function update_rotation() -- Направление от модели к метке local delta_trans = marker.trans - model.trans -- Получим вращение модели в виде кватерниона local rotation = _make_directed_rotation(osg.Vec3(1, 0, 0), delta_trans) -- Присваиваем вращение. Заметим, что необходимо перевести кватернион -- сначала в углы Крылова, а затем перевести их значения из радианов в градусы model.rotate = deg2rad(quat2euler(rotation)) end -- Будем обновлять вращение каждые 10 миллисекунд timer:subscribe(update_rotation, 0.01)
Доступны следующие действия:
- сбросить в начальное состояние
- параметр Масштаб; scale¶
Вводится в Система координат (TransformNodeReactor)
Параметр позволяет задать точный масштаб по координатам (
x,y,z) относительно родительского объекта.Доступны следующие действия:
- сбросить в начальное состояние
- поместить на метку автоматически (совместить габариты объекта и родительского объекта)
 зафиксировать оси (масштабировать отдельно по каждой оси, или по всем одновременно)
зафиксировать оси (масштабировать отдельно по каждой оси, или по всем одновременно)
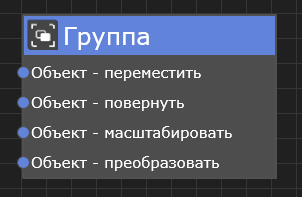
- действие Объект - переместить; setTrans(trans)¶
Установить новое значение перемещения объекта (параметра Перемещение (trans))
Данное действие равносильно присваиванию параметра Перемещение (trans)
transform:setTrans(osg.Vec3(0.0, 0.0, 0.0)) transform.trans = osg.Vec3(0.0, 0.0, 0.0)
- Параметры:
Перемещение / trans – Новое значение перемещения
- действие Объект - повернуть; setRotate(rotate)¶
Установить новое значение вращения объекта (параметра Вращение (rotate)).
Данное действие равносильно присваиванию параметра Вращение (rotate)
transform:setRotate(osg.Vec3(0.0, 0.0, 0.0)) transform.rotate = osg.Vec3(0.0, 0.0, 0.0)
- Параметры:
Вращение / rotate – Новое значение вращения
- действие Объект - масштабировать; setScale(scale)¶
Установить новое значение масштабирования объекта (параметра Масштаб (scale)).
Данное действие равносильно присваиванию параметра Масштаб (scale)
transform:setScale(osg.Vec3(1.0, 1.0, 1.0)) transform.scale = osg.Vec3(1.0, 1.0, 1.0)
- Параметры:
Масштаб / scale – Новое значение вращения
- действие Объект - преобразовать; setTransform(trans, rotate, scale)¶
Установить новые значения перемещения, вращения и масштаба (параметров Перемещение (trans), Вращение (rotate), Масштаб (scale). Данный вызов равносилен последовательным вызовам Объект - переместить (setTrans), Объект - повернуть (setRotate), Объект - масштабировать (setScale):
Следующие две конструкции полностью равносильны:
model:setTransform(osg.Vec3(0.0, 0.0, 0.0), osg.Vec3(0.0, 0.0, 0.0), osg.Vec3(1.0, 1.0, 1.0))
model:setTrans(osg.Vec3(0.0, 0.0, 0.0)) model:setRotate(osg.Vec3(0.0, 0.0, 0.0)) model:setScale(osg.Vec3(1.0, 1.0, 1.0))

 Равносильная конструкция
Равносильная конструкция
Advanced¶
Вспомогательные методы |
Описание |
|---|---|
|
Получить матрицу трансформации объекта. |
|
Задать матрицу трансформации объекта Параметры:
|